



Ansys Lumerical | 行波 Mach-Zehnder 調(diào)制器仿真分析 
上調(diào)制器臂還有一個(gè)行波電極 (TWE),相移應(yīng)用于此臂,而下臂保持零參考偏壓。光網(wǎng)絡(luò)分析儀向輸入 Y 支路提供光輸入,并從輸出 Y 支路接收輸出光信號(hào),而上臂 TWE 被直流信號(hào)偏置。 行波電極可調(diào)變光程最大為5000um(假設(shè)90%有效),源端與輸出端阻抗都設(shè)定50 Ohm,其他則為腳本輸入的步驟2與4仿真結(jié)果。
2820 1
宇熠科技 ??? 3年前
ZEMAX軟件技術(shù)應(yīng)用專題:基於 Alvarez自由曲面透鏡的光學(xué)變焦 
我們?cè)谝粋€(gè)光學(xué)系統(tǒng)中有幾組透鏡元件,它們沿著光軸沿著預(yù)定義的軌跡移動(dòng),從而提供了光學(xué)系統(tǒng)最終焦距(變焦係數(shù))的變化。在 Alvarez變焦鏡頭的情況下,我們有一對(duì)所謂的Alvarez鏡頭,這些鏡頭元件相互之間的橫向位移提供了光學(xué)系統(tǒng)焦距的變化。傳統(tǒng)變焦鏡頭與 Alvarez變焦鏡頭的主要區(qū)別在於,傳統(tǒng)系統(tǒng)鏡頭沿光軸運(yùn)動(dòng),而Alvarez系統(tǒng)鏡頭則沿垂直於光軸的方向運(yùn)動(dòng)。
2220
w**elab86_Swsp ??? 3年前
一期一會(huì) | 什么是相控陣列天線? 
寫在前面仿真、模擬、有限元分析、多物理場(chǎng)……這些術(shù)語是不是早已成為每位仿真人的“日常”?大家是否知曉其背后的技術(shù)原理和演進(jìn)趨勢(shì),正深刻地改變著世界?Ansys全新推出【Simulation Topics】系列專題,邀您一起探索仿真世界。
2910
Ansys中國(guó) ??? 3月前
ZEMAX軟件技術(shù)應(yīng)用專題:如何使用ZOS-API創(chuàng)建飛行時(shí)間用戶分析 
這種3D映射作為自動(dòng)駕駛汽車的關(guān)鍵使能技術(shù)在汽車行業(yè)變得越來越重要。在汽車行業(yè)之外,LiDAR用於移動(dòng)設(shè)備,用於增強(qiáng)現(xiàn)實(shí)、測(cè)量距離以及模糊照片和影片中的背景等功能。在這篇文章中,我們將展示如何使用ZOS-API創(chuàng)建使用者分析來測(cè)量LiDAR系統(tǒng)的飛行時(shí)間(TOF)。分析將讀取ZRD檔,提取資料並繪製到達(dá)探測(cè)器的射線的飛行時(shí)間。什麼是自訂分析?
2080
w**elab86_Swsp ??? 3年前
Ansys Zemax光學(xué)設(shè)計(jì)軟件技術(shù)教程:眼科鏡片設(shè)計(jì) 
當(dāng)眼球轉(zhuǎn)動(dòng)時(shí)遠(yuǎn)點(diǎn)的距離不會(huì)改變,因此會(huì)以這個(gè)距離為半徑形成一個(gè)“遠(yuǎn)點(diǎn)球”。此外,遠(yuǎn)點(diǎn)會(huì)是視網(wǎng)膜的光學(xué)共軛,因此眼鏡鏡片的功能就是把偏離的影像修正到遠(yuǎn)點(diǎn)球上。人眼的瞳孔在此系統(tǒng)中充當(dāng)光圈的角色,且當(dāng)視線移動(dòng)時(shí),瞳孔將同步的以眼球?yàn)橹行霓D(zhuǎn)動(dòng)。物平面通常是設(shè)定在無限遠(yuǎn),雖然一個(gè)近的物平面可以用來達(dá)成不同的鏡片設(shè)計(jì)。下面的例子展示了設(shè)計(jì)的原則。
2212
w**elab86_Swsp ??? 3年前
白皮書 | Ansys電機(jī)NVH仿真解決方案 
Ansys集成化的多物理場(chǎng)仿真平臺(tái)能為理解噪聲源、傳播路徑以及聲音感知提供端到端的完整解決方案,幫助工程師對(duì)電機(jī)定子、轉(zhuǎn)子和外殼的相關(guān)參數(shù)進(jìn)行研究,并評(píng)估電動(dòng)汽車的電氣、機(jī)械和聲學(xué)性能。Ansys先進(jìn)解決方案,助力工程師成功診斷并優(yōu)化電機(jī)的聲學(xué)特征。
3517
Cruise ??? 2年前
Ansys高頻電磁應(yīng)用領(lǐng)域及案例(中篇) 
將HFSS仿真得到的整個(gè)天線陣模型,在Circuit中調(diào)用,將整個(gè)天線陣,輻射單元,饋電網(wǎng)絡(luò)、移相器、功率放大器、雙工器、開關(guān)、衰減器、波束控制等各個(gè)部分組裝在一起,研究天線陣的整體性能,進(jìn)行系統(tǒng)級(jí)優(yōu)化設(shè)計(jì),考慮各種耦合、寄生效應(yīng)以及非線性效應(yīng)從而方便研究整個(gè)有源相控陣的綜合性能。
2627 1
Cruise ??? 3年前
Ansys Lumerical | 通過微透鏡和端面耦合器將光纖與光子芯片耦合 
我們通過鏡頭數(shù)據(jù)編輯器中的參數(shù)定義平移偏移(垂直、水平、散焦)和旋轉(zhuǎn)錯(cuò)位。然后導(dǎo)出場(chǎng)和對(duì)準(zhǔn)參數(shù)以供進(jìn)一步分析。步驟3:Lumerical FDTD中的自由空間到導(dǎo)模接下來,我們將場(chǎng)導(dǎo)入Lumerical FDTD,并使用對(duì)齊參數(shù)設(shè)置自定義源。該FDTD允許我們非常籠統(tǒng)地定義源,并無縫地從自由空間移動(dòng)到導(dǎo)模區(qū)域。計(jì)算傳輸功率,并將電磁場(chǎng)保存為最后一步的輸入。
2740
宇熠科技 ??? 1年前
為何仿真總在動(dòng)態(tài)工況下“失靈”?您可能缺了這份粘彈性數(shù)據(jù) 
03無縫仿真對(duì)接擬合獲得的Prony級(jí)數(shù)、WLF方程等參數(shù),可一鍵導(dǎo)入Abaqus、Ansys、Marc等主流CAE及Endurica 橡膠疲勞與耐久性分析軟件,直接用于您的實(shí)際產(chǎn)品仿真。可靠的動(dòng)態(tài)仿真,始于對(duì)材料粘彈性的深刻洞察。
2243
Endurica ??? 1月前
一期一會(huì) | 什么是電機(jī)? 
Ansys Mechanical結(jié)構(gòu)FEA軟件和Ansys Fluent流體仿真軟件:為電機(jī)的物理設(shè)計(jì)提供更詳細(xì)和定制的后處理仿真。Ansys ConceptEV設(shè)計(jì)和仿真平臺(tái):用于仿真電動(dòng)汽車動(dòng)力總成的專用工具。它可幫助系統(tǒng)及組件設(shè)計(jì)工程團(tuán)隊(duì)從設(shè)計(jì)流程初始階段就基于與需求相關(guān)聯(lián)的共享系統(tǒng)仿真進(jìn)行協(xié)作,使用戶能夠?yàn)椴煌恼嚰軜?gòu)候選方案以及其他更多應(yīng)用制定相應(yīng)的電機(jī)設(shè)計(jì)規(guī)范。
2540
Ansys中國(guó) ??? 3月前
Lumerical 次波長(zhǎng)數(shù)據(jù)模型與幾何光學(xué)聯(lián)合仿真 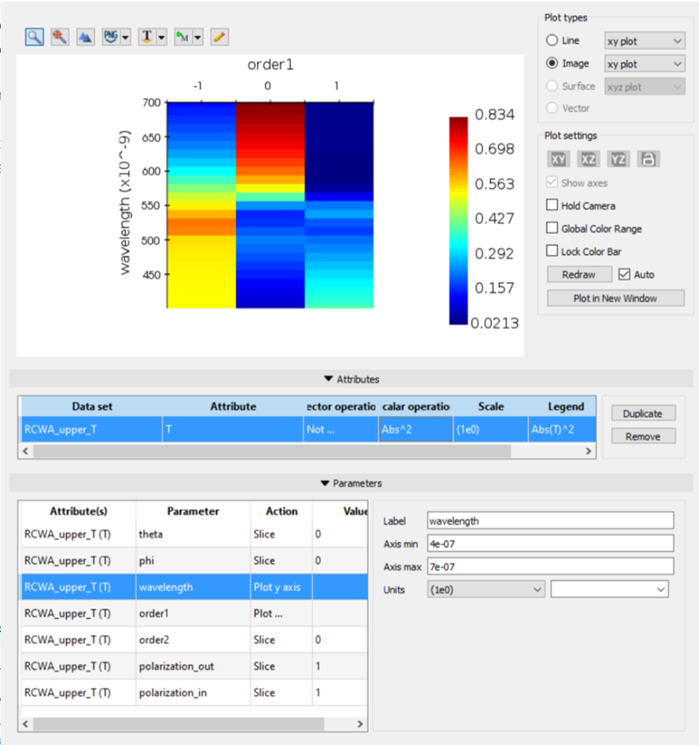
Lumerical 光子集成電路之PN 耗盡型移相器仿真工作流 Lumerical 納米線柵偏振器仿真應(yīng)用
3147 2 2
Ansys中國(guó) ??? 2年前
使用 Lumerical 對(duì) VCSEL 激光器進(jìn)行增益仿真 
Lumerical STACK 仿真抗反射偏振器件 Lumerical 單行載流子光電探測(cè)器仿真方法 案例 | 使用 Lumerical STACK 求解器優(yōu)化 OLED Lumerical 和 Zemax 針對(duì) OLED 的聯(lián)合仿真 Lumerical光子晶體布拉格光纖仿真應(yīng)用 Lumerical 光子集成電路之PN 耗盡型移相器仿真工作流 Lumerical
2578
Ansys中國(guó) ??? 2年前
Maxwell參數(shù)化建模和優(yōu)化設(shè)計(jì) 附DxfToAnsys軟件下載 
ANSYS Maxwell作為業(yè)界最佳低頻電磁場(chǎng)仿真設(shè)計(jì)軟件,提供了多種幾何參數(shù)化建模的方法,適用于不同復(fù)雜程度的工程問題;同時(shí),借助于ANSYS Workbench平臺(tái)電磁、結(jié)構(gòu)、流體以及優(yōu)化模塊,可進(jìn)行電機(jī)多物理場(chǎng)耦合的多變量多目標(biāo)優(yōu)化設(shè)計(jì),另外借助于ANSYS平臺(tái)強(qiáng)大的并行、分布式計(jì)算能力,工程師可在最短的時(shí)間內(nèi)對(duì)復(fù)雜優(yōu)化策略進(jìn)行分析和驗(yàn)證,快速實(shí)現(xiàn)產(chǎn)品迭代創(chuàng)新。
4155 1
小小酥1 ??? 3年前
NASA眼中CFD的未來(5)知識(shí)提取 
到2020年,目標(biāo)技術(shù)里程碑是能夠分析和可視化100億節(jié)點(diǎn)的非定常CFD模擬,而且這個(gè)目標(biāo)已經(jīng)由NASA和NVIDIA在火星著陸器的仿真上實(shí)現(xiàn)。 什么是知識(shí)提取 知識(shí)提取 (Knowledge Extraction) 是指從結(jié)構(gòu)化或非結(jié)構(gòu)化數(shù)據(jù)源中提取有用的信息和知識(shí)。該技術(shù)可以用于從大量數(shù)據(jù)中提取出有用的信息、知識(shí)和模式,以幫助決策和智能分析。
2794
網(wǎng)格大師 ??? 2年前
基于SolidWorks的自動(dòng)裝卸機(jī)械結(jié)構(gòu)設(shè)計(jì) 
為了提高整體裝卸系統(tǒng)的適用 性,利用機(jī)械式夾持機(jī)構(gòu)的直桿式平 移夾持機(jī)構(gòu),動(dòng)力源為電機(jī),使用 4 片夾片。圖 1 為夾持機(jī)構(gòu)運(yùn)動(dòng)示意, 構(gòu)件 A 為曲線,構(gòu)件 B 利用滑塊和 構(gòu)件 A、固定直桿 C 連接。在構(gòu)件 A 旋轉(zhuǎn)過程中,構(gòu)件 B 受到滑塊的約 束做直線運(yùn)動(dòng),運(yùn)動(dòng)規(guī)律和直桿、曲 桿在垂直方向投影面的交點(diǎn)位置相 關(guān),利用改變曲線參數(shù)對(duì)滑塊運(yùn)動(dòng) 速度和位置等參數(shù)進(jìn)行控制。
4675 5
太極元?dú)?/span> ??? 2年前
Lumerical案例 | 一種超高效率集成等離子體鈮酸鋰電光馬赫-曾德爾調(diào)制器 
2.結(jié)果2.1器件設(shè)計(jì)與制備所提出的等離子體TFLN調(diào)制器由兩個(gè)PSW-LN移相器構(gòu)成,其采用馬赫-曾德爾干涉布局嵌套排列(圖1a)。我們采用推挽驅(qū)動(dòng)方案,向兩個(gè)移相器臂施加等幅反相射頻信號(hào),從而有效抑制電光調(diào)制中的chirp效應(yīng),實(shí)現(xiàn)比單移相器高兩倍的調(diào)制效率。
3777
摩爾芯創(chuàng) ??? 4月前
Ansys Zemax OpticStudio 2023 R1 版本說明 
Ansys Zemax及光學(xué)仿真軟件 在光電圈可靠的咨詢與訂購(gòu)方式 下面我們一起為大家介紹一下Ansys Zemax OpticStudio 2023 R1的版本說明! 2023 R1 版本說明 2023年1月12日1.
3923
w**elab86_Swsp ??? 3年前
20條/頁(yè) 
跳至頁(yè)

技術(shù)鄰APP
工程師必備
工程師必備
- 項(xiàng)目客服
- 培訓(xùn)客服
- 平臺(tái)客服
TOP
